|
外形尺寸 |
长450×宽370×高450mm |
云台参数 |
水平:0°~360°,垂直:-90°~+20° |
|
整机重量 |
整机重量 |
整机重量 |
麦克阵列,10m,100Hz~18kHz |
|
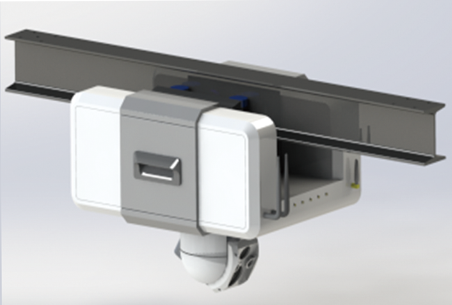
行走机构 |
吊挂于10#工字钢轨道运行 |
烟雾测量精度 |
5%obs/m |
|
行走速度 |
0~2m/s |
瓦斯测量范围 |
(1~100)%Ch4 |
|
系统爬坡能力 |
≤60°斜坡 |
防碰撞 |
前后超声波雷达 |
|
转向半径 |
水平≥0.8m |
续航时间 |
一次充满电不低于6h |
|
可见光相机 |
200万像素,10倍光学变焦 |
充电时间 |
无线充电3h |
|
红外热像仪 |
384*288 测温:-20℃~+550℃ |
防护等级 |
IP 65 |
高清视频采集 实时采集现场声音 高强度照明 双光谱视频监控摄像头 辅助照明 扬声播放
烟雾检测:矿用智能巡检机器人上搭载有烟雾、气体体传感器,当有烟雾产生,巡检机器人现场和上位机同时报警。
温度探测:设备运转过程中的故障点会存在局部温度过高的现象,红外温度传感器可快速检测发现损坏设备的位置。
甲烷检测:装置搭载甲烷传感器,有非常规气体产生时,矿用智能巡检机器人现场和上位机同时报警。
巡检速度:爬坡段和弯道段:≤0.5m/s直线段:≤2m/s。
声音采集:实时采集现场声音,经无线网络实时传输至远程端上位机。
无线充电:采用锂电池供电,充电采用先进的磁场感应充电,充电过程无接触,避免产生火花。
自动电量检测:采用锂电池供电,并自动检测电池电量。
自动充电:当电量不足时,自动寻找最近的无线充点电进行充电。
数据存储查询:将设备采集到的各种数据和处理分析后的结果存储在远程的上位机,以便以后对历史数据查询比较。
遥控定位:矿用智能巡检机器人巡检装置机器人具有自动巡检和人员手动操作功能。

7x24小时全国售前咨询热线:010-57281389
7x24小时全国售后服务热线:13020085953 15313016798
手机 | 微信同号:13020085953 QQ:993883817

营业地址(东部):北京市朝阳区伊莎文心广场A座3层B-22
营业地址(西部):北京市丰台区汽车博物馆东路1号诺德中心9-605


天润智力-专注于互联网平台建设与服务领域 中国互联网平台建设服务提供商
万网阿里云金牌首席合作伙伴站点 全线代理万网阿里云产品及服务
中国万网正式通过ISO9001国际标准质量体系认证
Copyright©1999-2026 天润智力 备案/许可证编号 京ICP备2020040216号-1


 公安部备案号 11010502032436
公安部备案号 11010502032436









